Rust in embedded systems
Are we there yet?
About me
- Alex Badics
- Developer and PM
- Opinions are my employer's
Sources
- Rust embedded book
- Rust for Embedded Systems:
Current State, Challenges and Open Problems
(Sharma et. al.) - Embedded Rust setup explained
(The Rusty Bits youtube channel) - Awesome Embedded Rust
(on github)
Should you use Rust in your commercial embedded project?

The syntax
pub fn read<P: AsRef<Path>>(path: P)
-> io::Result<Vec<u8>> {
fn inner(path: &Path) -> io::Result<Vec<u8>> {
let mut file = File::open(path)?;
let mut bytes = Vec::new();
file.read_to_end(&mut bytes)?;
Ok(bytes)
}
inner(path.as_ref())
}

(Pic unrelated.)
Developers
- Not too many
- Expensive
- Usually blockchain-oriented
- Training takes 2-3 months
- Proper expertise needs >1 year
Stability
- Language controlled by non-commercial entity
- New edition every 3 years
- General churn
- Crate (library) stability
- 0.x versions
- "MSRV bump is not breaking change"
- Rustc is pretty compatible though
Standardization
rustc== language standard- No formal language rules
- No "MISRA Rust"
- Ferrocene compiler though
Vendor support
- With C, you usually get:
- Toolchain
- Low level drivers
- BSP
- Preconfigured RTOS
- With Rust, you don't.
Ecosystem
- Is my MCU even supported?
- Is there a crate for my board
- What about this popular OLED screen I have?
- Or the gyro
- Or advanced USART feature support
Should you use Rust in your commercial embedded project?

Language features
- Rust is pretty high level
- Real programmers can write FORTRAN in any language
- Simple code => simple assembly
- Abstract code => simple assembly 🤔
But I can do that in C too...
- Cognitive load adds up
- Boilerplate
- Guarantees (contracts) not checked automatically
- Forced to reduce readability with optimization
But I can do that in C++ too...
- Yes, you actually can
- Which subset of C++ though?
- Would you let a Junior Dev write C++ code?
Language safety features

- No undefined behavior
- No null pointers
- No aliased pointers
- No implicit type conversions
- Array bounds checks
- RAII:
- No uninitialized memory
- No resource leaks
- No double frees
Language convenience features

- ?
- Foreach
- Operator overloading
- Templates
- For containers
- For functions
- Closures
- Const functions
C bindings
- "Rewrite it in Rust" is a meme
- bindgen
- cbindgen
- Unsafety
- C APIs are remarkably unsafe
- Guarantees are undocumented and unstable
Type system example: I/O pins
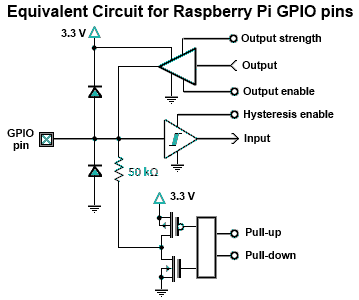
Low level register access
Hypothetical memory layout
Port A
| 0x10000000 | Output enable |
| 0x10000001 | Output value |
| 0x10000002 | Pull-up enable |
| 0x10000003 | Pull-down enable |
| 0x10000010 | Input value |
Port B
| 0x10100000 | Output enable |
| 0x10100001 | Output value |
| 0x10100002 | Pull-up enable |
| 0x10100003 | Pull-down enable |
| 0x10100010 | Input value |
Low level register access
typedef struct
__attribute__((__packed__))
{
unsigned char output_enable;
unsigned char output_value;
unsigned char pull_up_enable;
unsigned char pull_down_enable;
unsigned char _reserved[12];
unsigned char input_value;
} gpio_port_t;
gpio_port_t* const PORT_A = 0x10000000;
gpio_port_t* const PORT_B = 0x10100000;
void main() {
PORT_A->pull_up_enable = 1;
PORT_B->output_enable = 1;
}
#[repr(C, packed)]
struct GpioPort {
output_enable: u8,
output_value: u8,
pull_up_enable: u8,
pull_down_enable: u8,
_reserved: [u8; 12],
input_value: u8,
}
const PORT_A: *mut GpioPort =
0x10000000 as *mut GpioPort;
const PORT_B: *mut GpioPort =
0x10100000 as *mut GpioPort;
fn main() {
unsafe { (*PORT_A).pull_up_enable = 1 };
unsafe { (*PORT_B).output_enable = 1 };
}
Volatile
volatile gpio_port_t* const PORT_A = 0x10000000;
void spike() {
PORT_A->output_value = 1;
PORT_A->output_value = 0;
}
use core::ptr::{addr_of_mut, write_volatile};
const PORT_A: *mut GpioPort =
0x10000000 as *mut GpioPort;
fn spike() {
unsafe {
write_volatile(
addr_of_mut!((*PORT_A).output_value),
1
);
write_volatile(
addr_of_mut!((*PORT_A).output_value),
0
)
};
}
Safe-ish Pin struct
pub enum Direction {
Input,
Output,
}
pub enum Enabled {
Enabled,
Disabled,
}
pub enum SignalLevel {
High,
Low,
}
pub struct GpioPort {
raw: *mut GpioPortRaw,
}
impl GpioPort {
pub fn set_direction(&self, direction: Direction) {
unsafe { write_volatile(
addr_of_mut!((*self.raw).output_enable),
match direction {
Direction::Input => 0,
Direction::Output => 1,
},
)};
}
pub fn set_pull_up(&self, enabled: Enabled) { /* ... */ }
pub fn set_pull_down(&self, enabled: Enabled) { /* ... */ }
pub fn set_output(&self, level: SignalLevel) { /* ... */ }
pub fn get_input(&self) -> SignalLevel { /* ... */ }
}
Becoming safer: &mut
impl GpioPort {
pub fn set_direction(&mut self, direction: Direction) { /* ... */ }
pub fn set_pull_up(&mut self, enabled: Enabled) { /* ... */ }
pub fn set_pull_down(&mut self, enabled: Enabled) { /* ... */ }
pub fn set_output(&mut self, level: SignalLevel) { /* ... */ }
pub fn get_input(&self) -> SignalLevel { /* ... */ }
}
Becoming safer:
no Pull-up + Pull-down
pub enum PullState {
Float,
PullUp,
PullDown,
}
impl GpioPort {
/* ... */
pub fn set_pull_state(&mut self, state: PullState) {
/* Set both pull up and pull down registers */
}
/* ... */
}
Becoming safer: direction
- Output + pulling rarely makes sense
- Disable pulling on direction change
- Disable setting pull when in output mode
- Runtime cost
- Runtime errors
- Input + SetOutput will do nothing
- What if I forget to set direction?
- Runtime error?
Type states
pub struct InputPort {
raw: *mut GpioPortRaw,
}
impl InputPort {
pub fn to_output(self) -> OutputPort{
self.set_pull_state(Float);
/* ... set direction register ... */
OutputPort{
raw: self.raw
}
}
pub fn get_level(&self) -> SignalLevel
{ /*...*/ }
pub fn set_pull_state(
&mut self, state: PullState
) { /*...*/}
}
pub struct OutputPort {
raw: *mut GpioPortRaw,
}
impl OutputPort {
pub fn to_input(self) -> InputPort{
/* ... set direction register ... */
InputPort{
raw: self.raw
}
}
pub fn set_level(
&mut self, level: SignalLevel
) { /*...*/ }
}
Type states: extra
pub trait PullState {
fn set_registers(raw: *mut GpioPortRaw);
}
pub struct Float;
pub struct PullUp;
pub struct PullDown;
impl PullState for Float { /*...*/ }
impl PullState for PullUp { /*...*/ }
impl PullState for PullDown { /*...*/ }
pub struct InputPort<PS: PullState> {
raw: *mut GpioPortRaw,
_ps: std::marker::PhantomData<PS>,
}
impl<PS: PullState> InputPort<PS> {
pub fn get_level(&self) -> SignalLevel { /*...*/ }
pub fn set_pull_state<PSN:PullState>(self)
-> InputPort::<PSN>
{
PSN::set_registers(self.raw);
InputPort::<PSN> {
raw: self.raw,
_ps: std::marker::PhantomData::<PSN>{},
}
}
pub fn to_output(self) -> OutputPort{
let new_self = self.set_pull_state::<Float>();
/* ... */
}
}
Type states: generic functions
pub fn get_smooth<PS:PullState>(port: InputPort<PS>)
-> SignalLevel
{
const SAMPLES:u8 = 16;
let mut highs = 0;
for _ in 0..SAMPLES {
if port.get_level() == SignalLevel::High {
highs += 1;
}
}
if highs > SAMPLES/2 {
SignalLevel::High
} else {
SignalLevel::Low
}
}
Type state erasure
- If we need heterogeneous objects
- Multiple different ports in a collection
- Generic function without monomorphization
- We can
- Create an
enum - or a multifunctional object
- And add an
erase()method to the specific structs
- Create an
Trait or generic?

How to grant access to the port
- Global mutable variables are unsafe
- Singleton object (or cell)
- Create exactly one on init and pass as parameter
- Remember that structs can be "taken apart"
Selected projects


Ferrocene
- Certified version of
rustc- ASIL D
- SIL 4
- Unmodified upstream source
- Long term support
heapless
use heapless::Vec;
let mut vec = Vec::<_, 8>::new();
vec.push(1);
vec.push(2);
assert_eq!(vec.len(), 2);
assert_eq!(vec[0], 1);
assert_eq!(vec.pop(), Some(2));
assert_eq!(vec.len(), 1);
vec.extend(
[1, 2, 3].iter().cloned()
);
- Standard containers using memory pools instead of allocation
Vec,StringMap,SetArc,BoxQueue
embedded-hal
- De-facto standard embedded traits
- Solves the NxM problem
- Very limited
- GPIO, SPI, I2C, PWM, CAN
- No proper UART, interrupts, clocks
<register>
<name>CR</name>
<description>Control Register</description>
<addressOffset>0x00</addressOffset>
<size>32</size>
<access>read-write</access>
<resetValue>0x00000000</resetValue>
<resetMask>0x1337F7F</resetMask>
<fields>
<!-- EN: Enable -->
<field>
<name>EN</name>
<description>Enable</description>
<bitRange>[0:0]</bitRange>
<access>read-write</access>
<enumeratedValues>
svd2rust
- Translates CMSIS System View Description files to Rust code
- Automatically creates structs for memory-mapped peripherals
- Basically bindgen for hw
- Lots of generated board support crates
- Cortex-M, MSP430, RISCV, Xtensa LX6
svd2rust
let peripherals = stm32f407::Peripherals::take().unwrap();
cortex_m::interrupt::free(|_cs| {
// Power up the relevant peripherals
peripherals.RCC.ahb1enr.write(|w| w.gpioden().set_bit());
peripherals.RCC.apb1enr.write(| w| w.tim6en().set_bit());
// Configure the pin PD12 as a pullup output pin
peripherals.GPIOD.otyper.write(|w| w.ot12().clear_bit());
peripherals.GPIOD.moder.write(|w| w.moder12().output());
peripherals.GPIOD.pupdr.write(|w| w.pupdr12().pull_up());
// Configure TIM6 for periodic timeouts
let ratio = frequency::APB1 / FREQUENCY;
let psc = u16((ratio - 1) / u32(U16_MAX)).unwrap();
let arr = u16(ratio / u32(psc + 1)).unwrap();
unsafe {
peripherals.TIM6.psc.write(|w| w.psc().bits(psc));
peripherals.TIM6.arr.write(|w| w.arr().bits(arr));
};
peripherals.TIM6.cr1.write(|w| w.opm().clear_bit());
}
defmt
defmt::error!("The answer is {=i16}!", 300);
// on the wire: [3, 44, 1]
// string index ^ ^^^^^ `300.to_le_bytes()`
// ^ = intern("The answer is {=i16}!")
defmt::error!("The answer is {=u32}!", 131000);
// on the wire: [4, 184, 255, 1, 0]
// ^^^^^^^^^^^^^^^ 131000.to_le_bytes()
defmt::error!("Data: {=[u8]}!", [0, 1, 2]);
// on the wire: [1, 3, 0, 1, 2]
// string index ^ ^ ^^^^^^^ the slice data
// LEB128(length) ^
- "Deferred formatting"
- Log data is very compressed, reader uncompresses it to show
- String table stored in special elf section
$ cargo run --release
Compiling microbit v0.1.0 (/microbit/)
Finished release [optimized + debuginfo] target(s) in 0.17s
Running `probe-rs run --chip nRF51822_xxAA target/thumbv6m-none-eabi/release/microbit`
Erasing sectors ✔ [00:00:00] [############] 5.00 KiB/5.00 KiB @ 8.09 KiB/s (eta 0s )
Programming pages ✔ [00:00:00] [############] 5.00 KiB/5.00 KiB @ 5.29 KiB/s (eta 0s )
Hello from the microbit!
Going to udf to print a stacktrace on the host ...
Frame 0: exp_u128 @ 0x00000fa2
Frame 1: __udf @ 0x000000f2 inline
/.cargo/registry/src/index.crates.io-6f17d22bba15001f/cortex-m-0.7.7/src/../asm/inline.rs:181:5
Frame 2: udf @ 0x00000000000000f2 inline
/.cargo/registry/src/index.crates.io-6f17d22bba15001f/cortex-m-0.7.7/src/call_asm.rs:11:43
Frame 3: panic @ 0x00000000000000f2
/repos/microbit/examples/gpio-hal-blinky/src/main.rs:36:9
Frame 4: exp_u128 @ 0x000006be
/rustc/5680fa18feaa87f3ff04063800aec256c3d4b4be/library/core/src/ptr/const_ptr.rs:921:18
Frame 5: exp_u128 @ 0x000006ec
/rustc/5680fa18feaa87f3ff04063800aec256c3d4b4be/library/core/src/num/bignum.rs:299:60
Frame 6: b @ 0x0000015e inline
probe-rs
- CMSIS-DAP, JLink, ST-Link and FTDI
cargo runruns on hardware- Debug from GDB, VSCode, vim, etc., with breakpoints, local variable monitoring, etc.
- RTT and defmt integration
C RTOS support
- C bindings exist for popular RTOS-es
- FreeRTOS
- Zephyr
- RIOT (native support)
- Rust modules + C frame always works
- Rust as entry point sometimes works
Should you use Rust in your commercial embedded project?
But only if you find good crates first!
But only if you find good crates first!
RTIC
#[task(local = [led, state])]
async fn blink(cx: blink::Context) {
loop {
rprintln!("blink");
if *cx.local.state {
cx.local.led.set_high().unwrap();
*cx.local.state = false;
} else {
cx.local.led.set_low().unwrap();
*cx.local.state = true;
}
Mono::delay(1000.millis()).await;
}
}
- Based on "Stack Resource Policy" scheduling (1991)
- Scheduling by interrupt vector
- Tasks run to completion in interrupt handler
- 2 phases: init + tasks
- Resources: local + shared
#[embassy_executor::task]
async fn blink(pin: AnyPin) {
let mut led = Output::new(pin, Level::Low, OutputDrive::Standard);
loop {
led.set_high();
Timer::after_millis(150).await;
led.set_low();
Timer::after_millis(150).await;
}
}
#[embassy_executor::main]
async fn main(spawner: Spawner) {
let p = embassy_nrf::init(Default::default());
spawner.spawn(blink(p.P0_13.degrade())).unwrap();
let mut button = Input::new(p.P0_11, Pull::Up);
loop {
button.wait_for_low().await;
info!("Button pressed!");
button.wait_for_high().await;
info!("Button released!");
}
}
Embassy
- Basically embedded tokio + a HAL
- Single stack
- No dynamic memory
- Async executor uses interrupts => very low power
- USB and network stack
Chips with good Rust support
- ESP32 (both ARM and Xtensa)
- STM32
- ATmega328P
- Nordic nRF52
Summary
- Rust is not ready
for embedded use-cases - Rust is kind of ready
for embedded use-cases - Rust's type system is pretty cool
- Reach me at
alex@voidcomputing.hu